OKAMI: Teaching Humanoid Robots Manipulation Skills through Single Video Imitation
Posted: May 1st, 2024, Edited: Oct 22nd, 2024
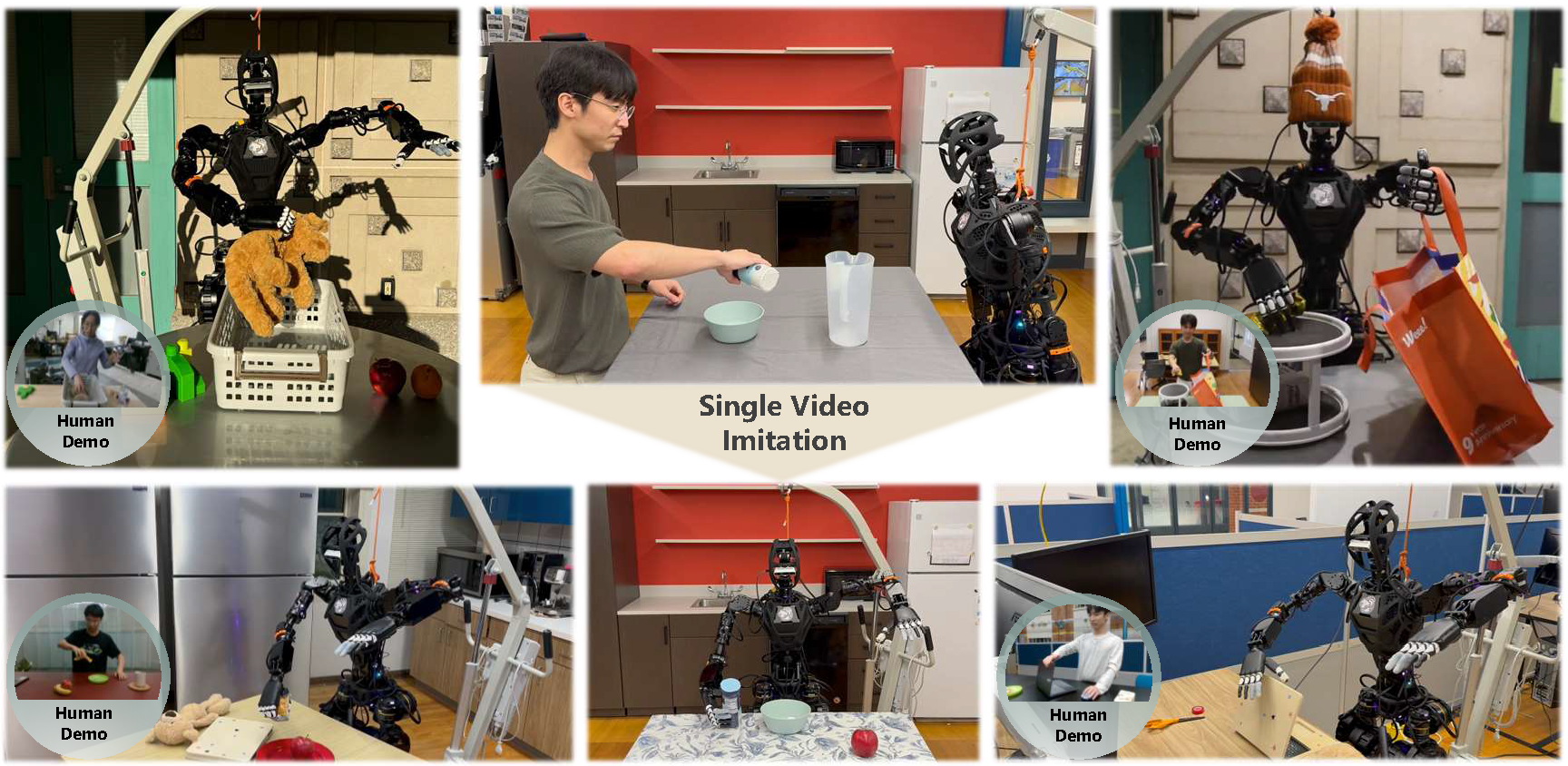
We study the problem of teaching humanoid robots manipulation skills by imitating from single video demonstrations. We introduce OKAMI, a method that generates a manipulation plan from a single RGB-D video and derives a policy for execution. At the heart of our approach is object-aware retargeting, which enables the humanoid robot to mimic the human motions in an RGB-D video while adjusting to different object locations during deployment. OKAMI uses open-world vision models to identify task-relevant objects and retarget the body motions and hand poses separately. Our experiments show that OKAMI achieves strong generalizations across varying visual and spatial conditions, outperforming the state-of-the-art baseline on open-world imitation from observation. Furthermore, OKAMI rollout trajectories are leveraged to train closed-loop visuomotor policies, which achieve an average success rate of 79.2% without the need for labor-intensive teleoperation. More videos can be found on our website.
Last Updated on Oct 22nd, 2024. Powered by greatest-gatsby-academic-template.