Humanoid robots, with their human-like embodiment, have the potential to integrate seamlessly into human environments. Critical to their coexistence and cooperation with humans is the ability to understand natural language communications and exhibit human-like behaviors. This work focuses on generating diverse whole-body motions for humanoid robots from language descriptions. We leverage human motion priors from extensive human motion datasets to initialize humanoid motions and employ the common ...
We study the problem of teaching humanoid robots manipulation skills by imitating from single video demonstrations. We introduce OKAMI, a method that generates a manipulation plan from a single RGB-D video and derives a policy for execution. At the heart of our approach is object-aware retargeting, which enables the humanoid robot to mimic the human motions in an RGB-D video while adjusting to different object locations during deployment. OKAMI uses open-world vision models to identify task-rele ...
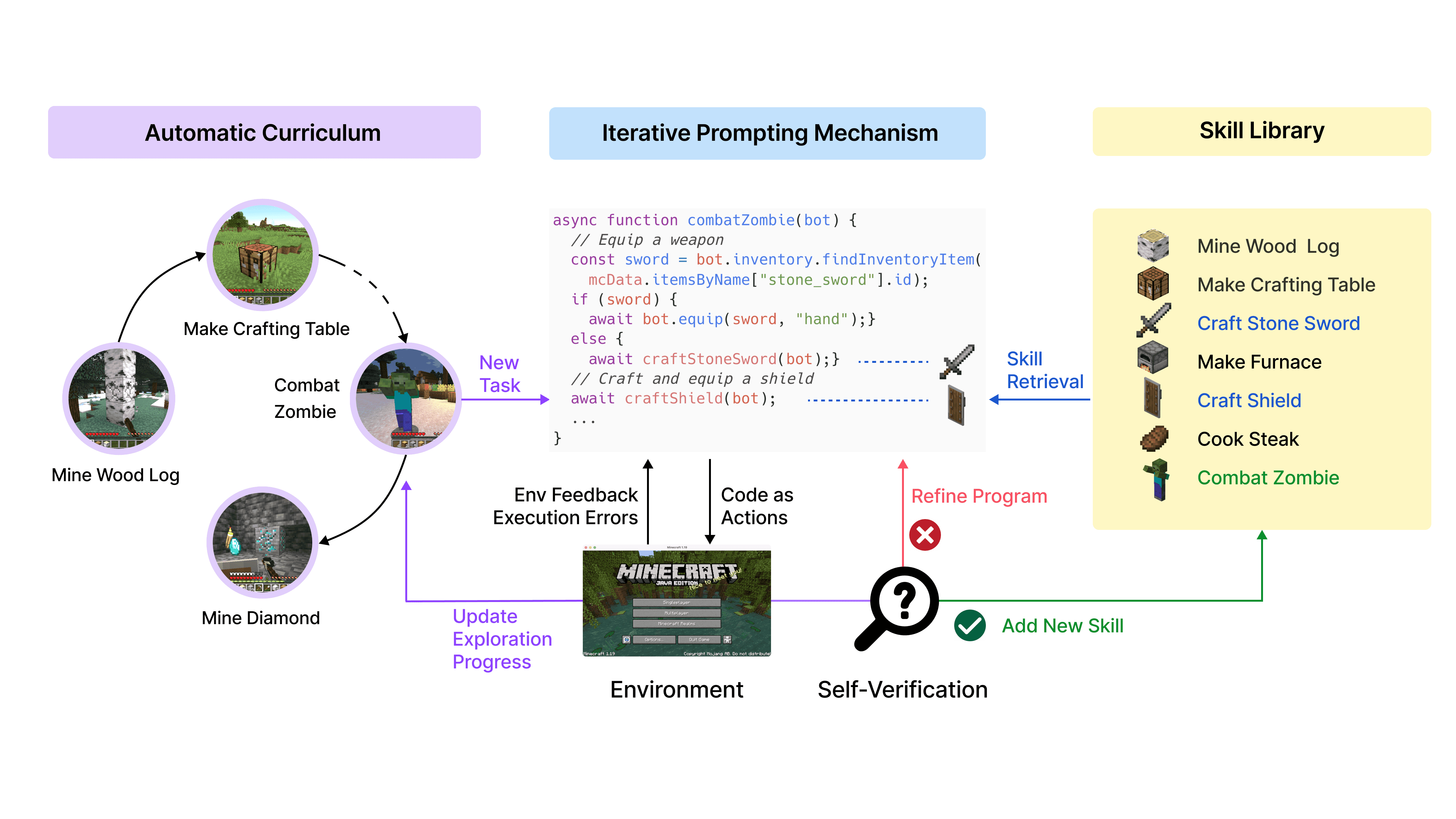
We introduce Voyager, the first LLM-powered embodied lifelong learning agent in Minecraft that continuously explores the world, acquires diverse skills, and makes novel discoveries without human intervention. Voyager consists of three key components: 1) an automatic curriculum that maximizes exploration, 2) an ever-growing skill library of executable code for storing and retrieving complex behaviors, and 3) a new iterative prompting mechanism that incorporates environment feedback, execution err ...
XR projects made in EECS 498-003
This is a gym environment for RL agents to play Pokemon Gold.